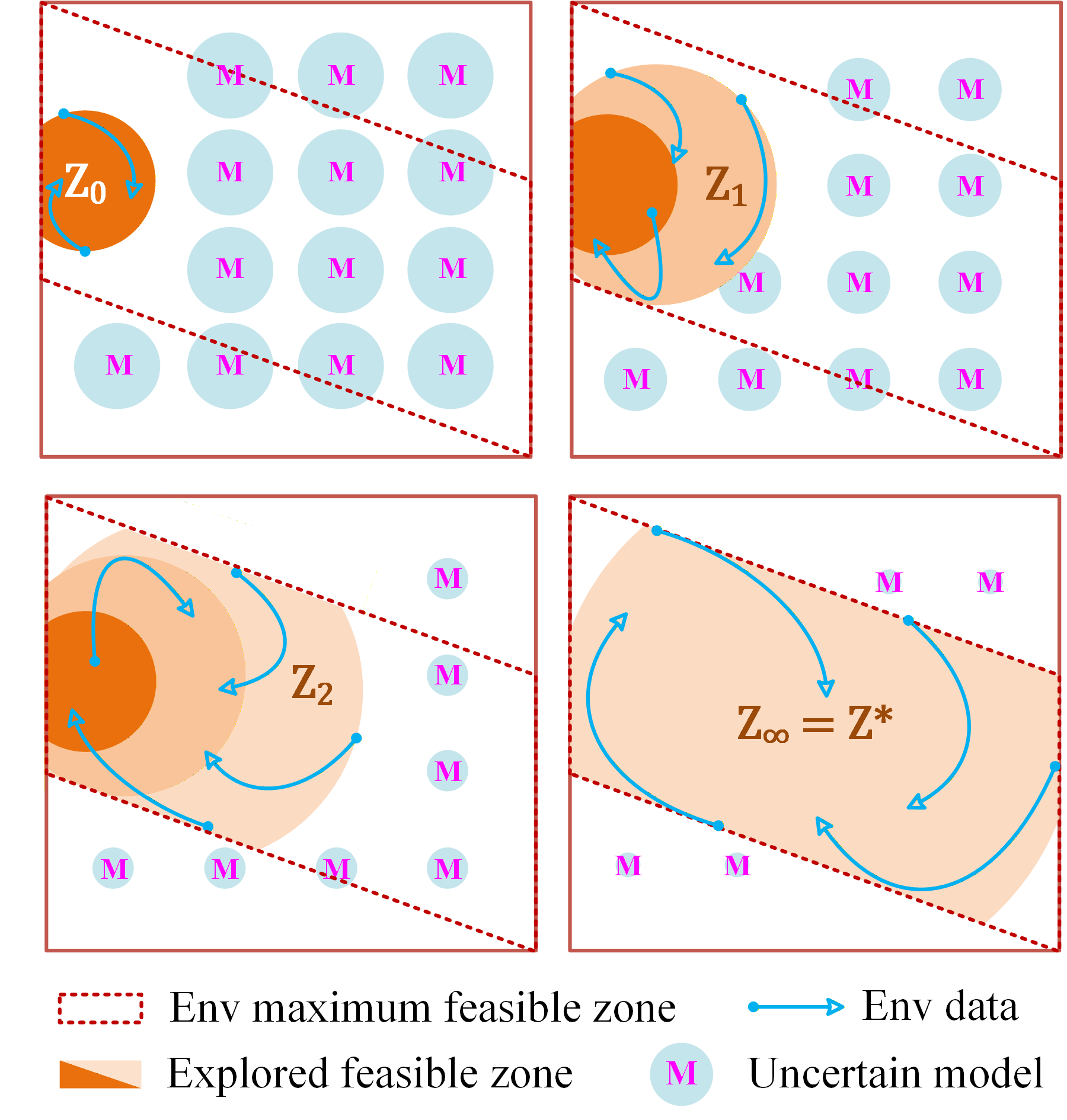
On the Equilibrium Between Feasible Zone and Uncertain Model in Safe Exploration
Yujie Yang*, Zhilong Zheng*, Shengbo Eben Li
IEEE Transactions on Pattern Analysis and Machine Intelligence (T-PAMI), 2026
I am a Ph.D. student at Intelligent Driving Lab (iDLab), School of Vehicle and Mobility, Tsinghua University, where I am fortunate to be advised by Prof. Shengbo Eben Li and Prof. Bo Cheng. During my Ph.D., I spent wonderful time as a visiting student at Carnegie Mellon University, working with Prof. Changliu Liu. Prior to that, I received my B.E. degree from the School of Vehicle and Mobility, Tsinghua University in 2021. My research lies in safe reinforcement learning theories, algorithms, and applications to autonomous driving and robotics.
A full list of publications can be found on my Google Scholar page.
(* denotes equal contribution)
Yujie Yang*, Zhilong Zheng*, Shengbo Eben Li
IEEE Transactions on Pattern Analysis and Machine Intelligence (T-PAMI), 2026
Yujie Yang*, Jinglin Teh*, Ziyu Lin, Kaicheng Yu, Tao Zhang, Shengbo Eben Li
International Conference on Learning Representations (ICLR), 2026
Yujie Yang, Yuxuan Jiang, Jianyu Chen, Shengbo Eben Li, Ziqing Gu, Yuming Yin, Qian Zhang, Kai Yu
American Control Conference (ACC), 2023
Yujie Yang, Jianyu Chen, Shengbo Eben Li
Learning for Dynamics and Control Conference (L4DC), 2022
Yuhang Zhang*, Yujie Yang*, Shengbo Eben Li, Yao Lyu, Jingliang Duan, Zhilong Zheng, Dezhao Zhang
IEEE Transactions on Cybernetics (T-CYB), 2025
Shentao Qin*, Yujie Yang*, Yao Mu*, Jie Li, Wenjun Zou, Shengbo Eben Li, Jingliang Duan
International Conference on Machine Learning (ICML), 2024
Jiaxing Li*, Hanjiang Hu*, Yujie Yang*, Changliu Liu
IEEE Control Systems Letters (L-CSS), 2025
Yuxuan Jiang, Yujie Yang, Zhiqian Lan, Guojian Zhan, Shengbo Eben Li, Qi Sun, Jian Ma, Tianwen Yu, Changwu Zhang
IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS, Oral), 2024
Zeyang Li, Chuxiong Hu, Yunan Wang, Yujie Yang, Shengbo Eben Li
IEEE Transactions on Pattern Analysis and Machine Intelligence (T-PAMI), 2024
Wenxuan Wang, Yuhang Zhang, Jiaxin Gao, Yuxuan Jiang, Yujie Yang, Zhilong Zheng, Wenjun Zou, Jie Li, Congsheng Zhang, Wenhan Cao, Genjin Xie, Jingliang Duan, Shengbo Eben Li
Communications in Transportation Research, 2023
Yujie Yang*, Zhilong Zheng*, Shengbo Eben Li, Jingliang Duan, Jingjing Liu, Xianyuan Zhan, Ya-Qin Zhang
Preprint, 2024
Yujie Yang*, Zhilong Zheng*, Shengbo Eben Li
Preprint, 2024